Collavorative Autonomous Site Assistance
MRAC 2019/2020
Faculty: Carlos Rizzo. Assistant: Soroush Garivani.
Students: Cedric Droogmans, Luis Jayme Buerba, Abdelrahman Koura u0026amp; Alexandros Varvantakis
Wrench time of labours on construction site is 29% that means 81 % of the time is wasted in tool & material handling, material preparation and mobility This also means less productivity and less cost saving.
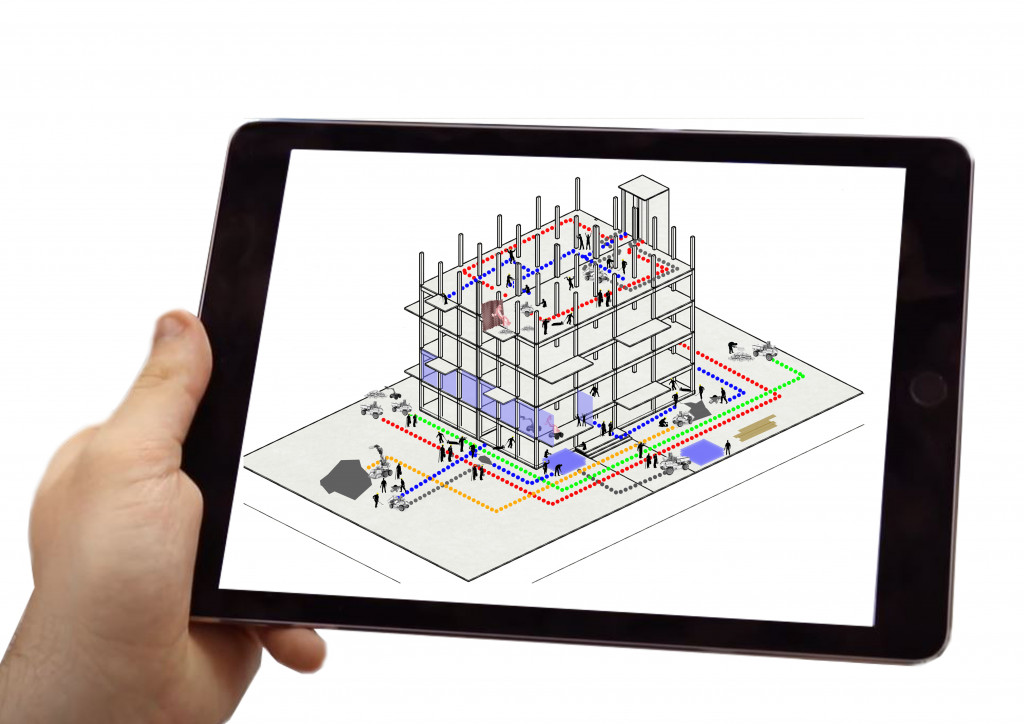
Taking construction site as a complex environment, many layers are detected. Everyone have their own behaviour, and this is the reason why find a system to track each component is neccesary.A proposed platform for construction site management has two principal components: sotfware and hardware.
Robots are data driven collecting data for the system. Is possible to identify a local behaviour and a general one.
System is connected to robots through voice commands, when a worker need a tool or material, send the request using the mic on helmet to the system. The system analyzes it and send the robot to cover it. System uses several technical tools to allow this process as is observed on the graphic.
Robot also has a local level connection, because to reach destination use of local navigation is needed. This is an autonomous process, the path is the input for the system. When robot reach the worker, need to identify him to release the tool or material, using face recognition as local process and sending information to the system to get the approval . The added value of our proposal is based on time reduction, path control, tool and material management.

Construction sites are dynamic and challenged environment. Time management is a key aspect to solve.
